
- Видео 56
- Просмотров 9 806 047
IRIM LAB KOREATECH
Добавлен 3 окт 2015
Unveiling a Lightweight Walking Assist Robot WIM at CES 2024
Congratulations! WIM won two Innovation Awards at CES 2024.
Our unique walking assist robot WIM only weighs 1.6kg and outperforms other conventional walking assist robots.
We hope WIM helps people and makes life better!
To experience WIM in person, please visit CES 2024 in Las Vegas!
North Hall #9243 WIRobotics booth.
- To learn more about WIM and WIRobotics,
please visit WIRobotics.com
- To learn about the effectiveness of WIM especially for seniors,
please visit www.youtube.com/@WIRobotics
- WIM will go on sale in February 2024. See you soon!
%Excellent work, WIRobotics members! We are so proud of ourselves!
% Many thanks to IRIM LAB members for their unwavering support!
Our unique walking assist robot WIM only weighs 1.6kg and outperforms other conventional walking assist robots.
We hope WIM helps people and makes life better!
To experience WIM in person, please visit CES 2024 in Las Vegas!
North Hall #9243 WIRobotics booth.
- To learn more about WIM and WIRobotics,
please visit WIRobotics.com
- To learn about the effectiveness of WIM especially for seniors,
please visit www.youtube.com/@WIRobotics
- WIM will go on sale in February 2024. See you soon!
%Excellent work, WIRobotics members! We are so proud of ourselves!
% Many thanks to IRIM LAB members for their unwavering support!
Просмотров: 11 541
Видео


Introducing HyperLeg: Human-like Robot Leg and Foot for Highly Dynamic Motions
Просмотров 247 тыс.Год назад
Hyperleg: Highly dynamic robot leg aiming at explosive, acrobatic, delicate, and smooth motions, such as walking, sprinting, jumping, or dancing. - 8.2 kg mass, 786 mm height, 4 degrees of freedom - Robust and lightweight 3-DOF foot mechanism - Actuators for the knee, ankle, & toe are located at the thigh frame. - Intentionally coupled transmission for high torque - Human-like wide Range of Mot...
LIMS3-AMBIDEX: Cartesian Space Impedance Control
Просмотров 17 тыс.Год назад
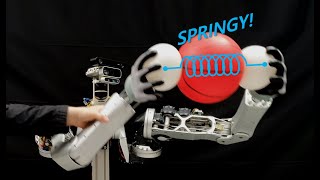
Cartesian Space Impedance Control of LIMS3-AMBIDEX 1. Holding balls using virtual spring-dampers 2. Maintaining end-effector orientation 3. Virtual Boundary in Cartesian Space - Proprioceptive control not using force or torque sensors - Cartesian space impedance without inertia shaping - Light, soft, safe, and fun

Presenting the Unique Capability of LIMS3! - Impact and Compliance Test
Просмотров 32 тыс.Год назад
- Gravity and Friction Compensation - Safe Impedance Control - Impact Resilience Test - Interaction with Impacts IRIM LAB, KOREATECH with NAVER LABS

New LIMS with Improved Performance! LIMS3-AMBIDEX
Просмотров 24 тыс.Год назад
LIMS3-AMBIDEX [Improved Properties] - Increased payload - Exceptional resilience to the impact - Robust and simple mechanism aiming at commercialization [Specifications] Payload: 5 kg in the entire workspace Torque: 4 times higher torque than LIMS2-AMBIDEX Cont. torque: 42Nm, Peak torque: 119Nm Total mass: 9.1 kg per arm Moving part mass (under shoulder): 4.50 kg Impact resilience: collisions w...

An Inherently Safe NP Swab Sampling Robot for COVID-19
Просмотров 6 тыс.2 года назад
[Specifications and Advantages] - 3 DOF (RCM, swab insertion, swab rotation) - Nonsingular RCM mechanism (-45~90 deg) - Extremely small distal mass (35 g) - Mechanical compliance with accurate limit force (0.5 N) - Automatic swab releasing mechanism for recapping [Further works] - Complete the entire system considering vial capping and sanitization. - Apply face and nostril detection algorithms...

Preliminary Experiments on Dynamic Human-Robot Interaction
Просмотров 18 тыс.2 года назад
Preliminary Experiments on Dynamic Human-Robot Interaction

Congratulations on KOREATECH 30th Anniversary!
Просмотров 1,6 тыс.2 года назад
Happy birthday, KOREATECH! Thank you to everyone who celebrated the anniversary. Thank you for the great collaboration, Prof. Kang-Sun Choi. cms3.koreatech.ac.kr/cv3vpl/index..do Special thanks to all IRIM LAB members. Your efforts shined!

Agile Omnidirectional Mobile Robot for Human Environments
Просмотров 36 тыс.3 года назад
Agile Omnidirectional Mobile Robot with Gravity Compensated Wheel-Leg Mechanisms for Human Environment - Changeable supporting polygon with a small footprint like humans. - Holonomic omnidirectional mobile robot with wheel-leg mechanisms - 4 mecanum wheels with gravity compensated 2-DOF legs % Submitted to IEEE IROS2021 and RA-L % Supported by NAVER LABS
Self-Contained 2-DOF Ankle-Foot Prosthesis Ver.1 First Test!
Просмотров 26 тыс.3 года назад
Self-Contained 2-DOF Ankle-Foot Prosthesis with Low-Inertia Extremity for Agile Walking on Uneven Terrains - All-In-One design including the battery and electronics - 2.25 kg comparable to commercial 1-DOF prostheses - Extremely low inertia at distal frames - Unidirectional flexion assist spring at the proximal part % Submitted to IEEE IROS2021 and RA-L. % Supported by Hugo Dynamics & Korea Ins...
FLLEX Hand Ver. 2 : Robustness and Payload Test
Просмотров 67 тыс.4 года назад
FLLEX Hand Ver. 2 - Increased degrees of freedom: from 12 DOF to 15 DOF - Decreased weight and size: from 2.27 kg to 1.81 kg - Removal of remaining bearings in the fingers: No bearings and metal pins in the fingers and the palm -15-axis motor controller developed from scratch - Wrist design for future addition of 2-DOF actuation Further works - Development of a 2-DOF wrist actuation mechanism -...
BLT Gripper : Grasping Mode, Irregular Object, Payload/Repeatability Test, and an Improved Gripper
Просмотров 16 тыс.4 года назад
BLT Gripper 1. Various Grasping Mode Test 2. Irregular Shaped Object Test 3. Payload and Repeatability Test and, Introducing an Improved Gripper % Submitted to IROS 2020 and RA-L
BLT Gripper: 3-Finger, 5-DOF Adaptive Gripper
Просмотров 54 тыс.4 года назад
BLT Gripper (Belt and Link actuated Transformable adaptive gripper with active transition capability) : - A 3-Finger 5-DOF adaptive gripper with active transition capability between precise pinch and compliant grasp. - Simple and unique finger design providing evenly distributed contact force and pressure for stable grasping. - Size and weight : 81 x 208 x 96 mm, 1.2 kg - Number of Act. : 5 Fle...
LIMS2-AMBIDEX Whole Body Motion Test
Просмотров 311 тыс.4 года назад
LIMS2-AMBIDEX Whole Body Motion Test Using Parabolic Blending Trajectories - Combined motions of two 7-DOF arms, one 3-DOF waist, and one 3-DOF neck. - Smooth trajectory generated by using a parabolic blending of 11 via points in joint space. - The trajectory is predetermined. Sensor feedback is not used.
FLLEX Hand First Run! - Preliminary Test
Просмотров 54 тыс.4 года назад
5-Finger 12-DOF Hand - Thumb, index and middle fingers : 3 DOF per finger - Ring and little fingers: totally 3 DOF (2 underactuated flexions, 1 coupled ab/adduction) Impact Absorbing Actuators - Actuated by BLDC motors and ball-screws - Impact and overload absorbing clutch mechanism To be improved - Adding a 2-DOF wrist mechanism - Soft and robust skin with fluid lubrication - Reducing actuator...
3-DOF Waist for LIMS2-AMBIDEX using Gravity Compensation Mechanisms
Просмотров 65 тыс.5 лет назад
3-DOF Waist for LIMS2-AMBIDEX using Gravity Compensation Mechanisms
Waist Mechanism for LIMS2-AMBIDEX with Arm Motions
Просмотров 14 тыс.5 лет назад
Waist Mechanism for LIMS2-AMBIDEX with Arm Motions
Payload and Manipulation Test of FLLEX Hand
Просмотров 21 тыс.5 лет назад
Payload and Manipulation Test of FLLEX Hand
Repeatability of FLLEX Hand under Multiple Impacts
Просмотров 8 тыс.5 лет назад
Repeatability of FLLEX Hand under Multiple Impacts
IROS 2018 Demo - Introduction to LIMS2-AMBIDEX
Просмотров 26 тыс.5 лет назад
IROS 2018 Demo - Introduction to LIMS2-AMBIDEX
IROS 2018 Demo - Motion Teaching and Repeatability Test
Просмотров 16 тыс.5 лет назад
IROS 2018 Demo - Motion Teaching and Repeatability Test
[Undergraduate Project] Balancing Motorcycle
Просмотров 6 млн6 лет назад
[Undergraduate Project] Balancing Motorcycle
LIMS2-AMBIDEX backdrivability and torque limiting
Просмотров 27 тыс.6 лет назад
LIMS2-AMBIDEX backdrivability and torque limiting
That’ll need a clever cpu to allow a lean on bends 🤔
Very cool design! Nice work
Its gonna take at least 3 generations to make a perfect legs.
I'll trade in my real legs for robotic ones, any day, I am tired of having sore feet and feeling my legs getting weak, I could do perfect squats. Though I should keep my thighs, for reproduction sake.
So, when can I get my knees replaced with these? I'm in my mid 30s and already bending my knees is like flipping a coin, will I stand up gracefully or will my knee crack and start glowing? _(like a glowstick)_
Incredible! You amazing people have some of the best minds on the planet, you will do wonders for the world!
so ... basically biomimicry of foot anatomy .
HEY, could you share the details of the project? We are writing a paper and we will for sure mention your reference for the same. Let me know if it works for you, we will really be thankful
I wonder if this could be used for rehabilitation.
Very good advice
LIMS3 is kind and friendly. The design is very human.
Fantastically done.😁🤔
Хрустит как у меня кости
As seen in 0:57 you have those stiff parts Rod look like part why didn't you route cables in there? I mean it looks that they maintain a fixed length and the max Engle is not too steep to brake flexible wires. It's only a suggestion from me that you could pick up for free. I don't want are need anything I just want to see more improvements in this thing your stuff that you do has potential. Keep it up pal 👍😎
Very nice leg, but why the mask, is the leg toxic? 😂😂😊
There is no truth in the flesh, only betrayal. There is no strength in the flesh, only weakness. There is no constancy in the flesh, only decay. There is no certainty in the flesh, only death.
❤ 1:13 приветствие
I see military adopting the usage of these as soon as they make them reliable enough in a combat zone. And next thing we know, we will slowly but surely become cyborgs!
You should put a little teddy bear on top, so that it looks less scary for the user.
I used to have a friend named Lee majors. He lost 3 limbs and his sight and hearing. The government fitted him with bionic replacements. Then he worked for.them.
Only problem I noticed right away is the lack of ankle and thigh rotation. You do have the ankle tilt but with neither rotation joint there are movements this leg simply cannot do that humans make frequent use of while turning or rotating on their feet. Admittedly this may not be as critical for out and out running purposes but if your goal is to enable movements used for dancing? Yeah you're gonna need those.
How much it cost and why so expensive?
Now challange number 2, link it to the nervous system to have a fully functional cybernetic leg
A lamp on the top would be perfect.
METAL GEAR
I'm gonna need one of those
rear Deer leg is suitable for runing and jumping.
this is the stuff you'd see in a cyberpunk universe. beautiful
So another lame narration where the the person hasnt learned to talk yet
This is an old video now, but I’m wondering if anyone can explain the advantage of the 2DoF join shown compared to a joint made of two rolling spheres that it is equivalent to. Are rolling spheres more prone to slipping even with a mesh? Is there less friction in this version? Is it simply more durable?
I could squat 1000 times with this, I can jump really high, I can run at 40kmph consistently for 1hr, I can kick someone, and they'd stop fighting instantly. but at what cost
This’ll be made into a sex doll, guaranteed
Okay, but can i get this implanted as a prosthetic yet?
like a bicycle... interesting
ik i am not even close to being at this level of intelligence, but shouldnt you want the user to land feet front first instead of heel first? landing heel first gives no damping and sends all the kinetic energy straight up through the hip
AUTOMAIL
AAARRRRGH ROBOT FEET ARE RRRREAAALLL!!!!!!!
This is truly incredible
cool design and kinematics for shock absorption and could calculate how much footing is needed for uneven surfaces that it cant see but feel with front tip, heel and soul sensors before the whole foot flats a surface. The reverse also looks like it might work well for accuracy on takeoffs . I imagine this could work as standalone for prosthetic or coupled with a bipedal or 4 legged robot.
should collaborate with boston dynamics
Yes, I'll take 4, please
give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs give me robot legs
The Semi rotational movements at hip is lacking. But overall it is quite good.
you can clearly see that landing on your heel is bad even for the robot
This is really impressive!
Giving hope that robots may someday speak Italian
seems like this robot has autism
Can I volunteer as a human test subject?